
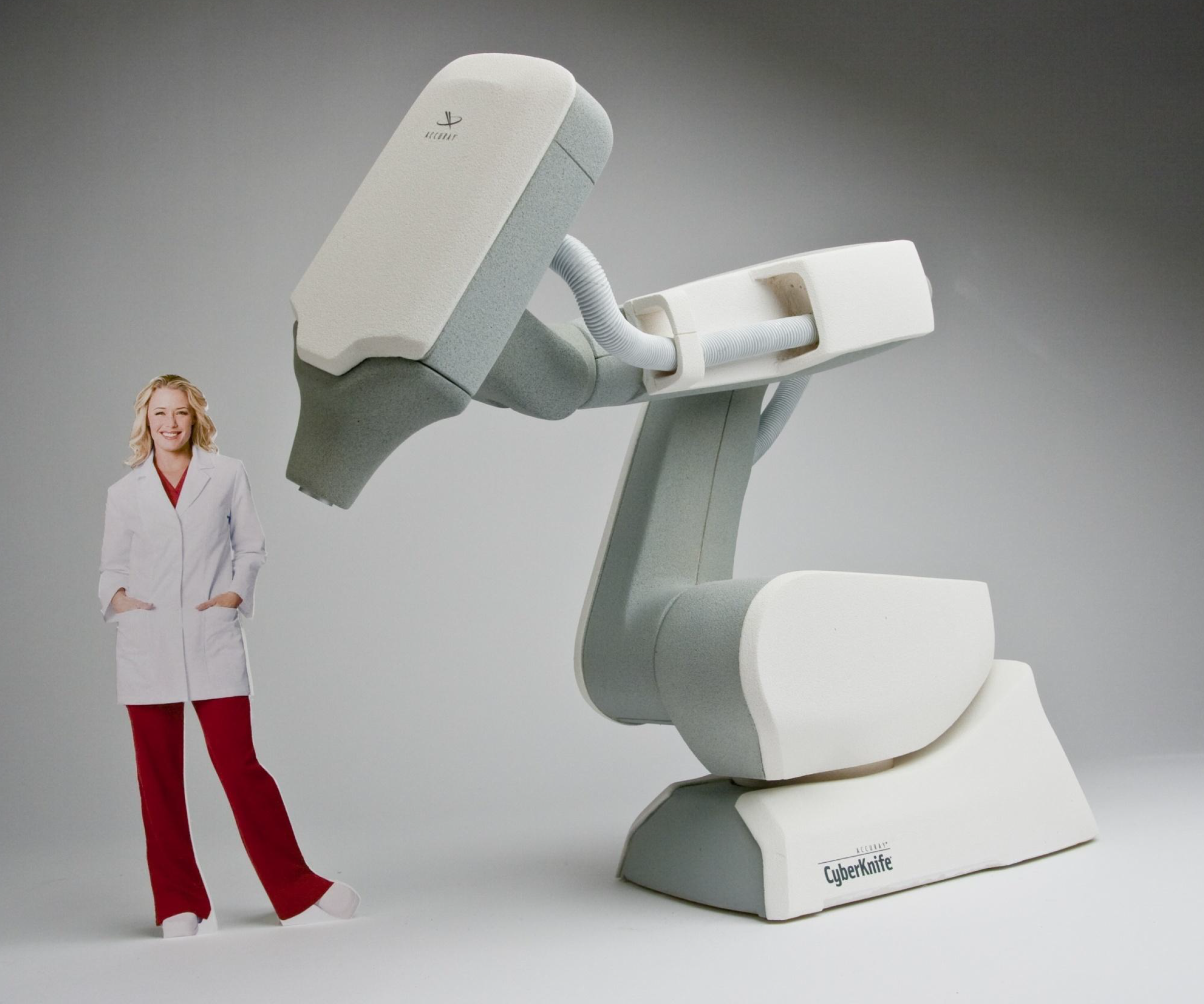
In 2011-2012 our team at Speck design under t Tark Abed had a chance to completely re-design Accuracy Cyber Knife M6 surgical laser robot. It was based on a KUKA robotic arm platform. This is a high precision, multi functional device with almost infinite amount of kinematic positions.
Quantitative and qualitative research was done by ID, UXR and Engineering teams to establish design direction. During this research phase we evaluated the competitive landscape and tested human perception of what customers would consider to be safe and approachable robots.


Design exploration of the robotic arm led to a final theme that the client picked as design direction .




To validate our design, we worked closely with the engineering team to first create table top models that we can actually rotate in space and flush out all kinematic challenges. Once we gained confidence in feasibility, we made a full scale prototype with a functional robotic arm inside.



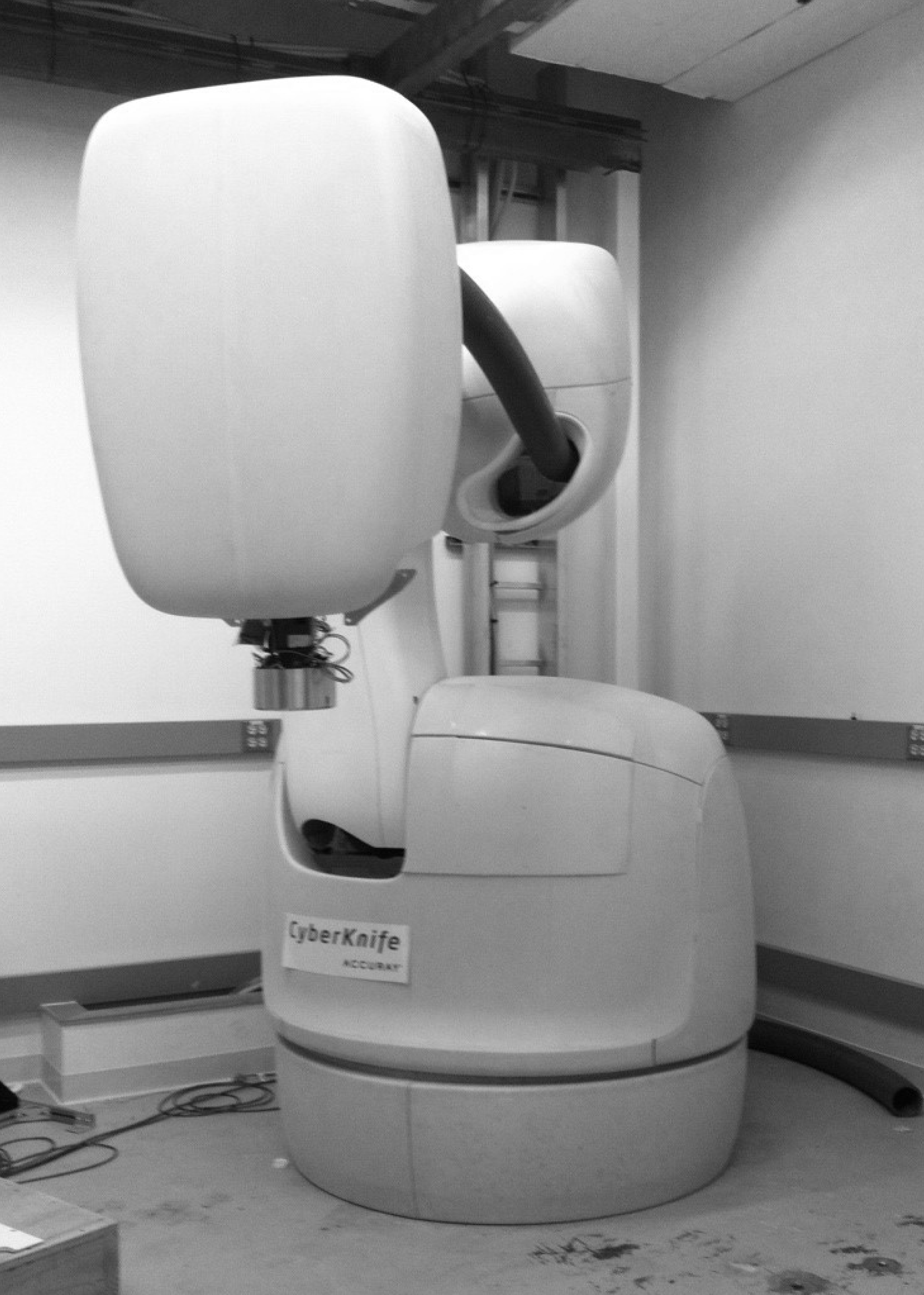
In order to get final approval and kick off production tooling, we created a 1:1 “golden sample” This model had limited functionality but fully represented design intent.



